9103
How To: Yaskawa Auto-Tuning
(Watch Yaskawa tutorial: https://www.youtube.com/watch?v=_9TW9wodQ8M)
Prerequisites:
- have a tuning cable
- download and install SigmaWin+ (https://www.yaskawa.com/pycprd/download/search/detail?n=JZSP-WP002)
- Copy over USB folder (M:\Production\Products\Drives-Servo\Yaskawa\Software\SigmaWinPlus555)
- Check device manager in the usb section or unrecognized device section to find the yaskawa drive. update the driver manually, looking in the USB folder copied over.
- Open SigmaWin+ and connect to drive
- If drive is not showing, go to device manager and find the yaskawa drive and update drivers (found on server: production, product, servo, yaskawa, software)
Auto-Tuning:
- Search and connect to the drive
- System must be enabled but drives not enabled
- There must be power to the drives, but disable the drive (deselect drive-enable (14-1) or if necessary, pull the control cable out from the drive)
- Select Tuning --> Tuning to begin the tuning process

Setup:
- Select "No reference input" and press "Auto Tuning"
- Choose "0:A moment of inertia is presumed" (Auto tune will calculate inertia for us)
- Choose "2: Position"
- Choose appropriate mechanism
- Edit distance if necessary (3 revs is default)
- Select "Start tuning using the default settings" (can be done without this option, but this is the typical way to start)
- Select "Next"
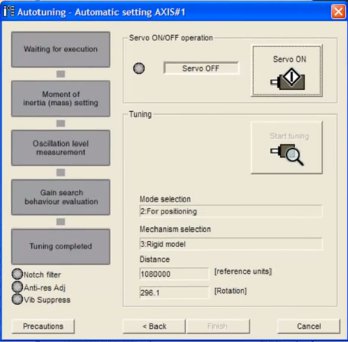
Tuning:
- Turn the "servo ON"
- Select "Start Tuning"
- Software will run the motor through it's pre-programmed moves
- Click "Finish"
- The drive is tuned
- Click "Finish" again to exit tuning mode
Additional Parameter Checks:
- Check that model following is not turned on (Pn140, digit 0 set to 0, Does not use model following)
- Set feed forward gain (Pn109) to at least 75% and test machine
- If motor still lags, increase until acceptable
- If motor is shaky/jerky, decrease until acceptable